


Obeliscos na Lua? Uma análise tridimensional
Uma análise científica sobre estranhas formações, supostamente artificiais, existentes ao norte da cratera Ariadaeus B, na superfície lunar. Esses objetos, conhecidos como ‘Lunar Spires’ ou ‘Blair Cuspids’, foram visualizados por uma espaçonave Lunar Orbiter, em 1966.
Por Mark Carlotto
Neste artigo:
Introdução
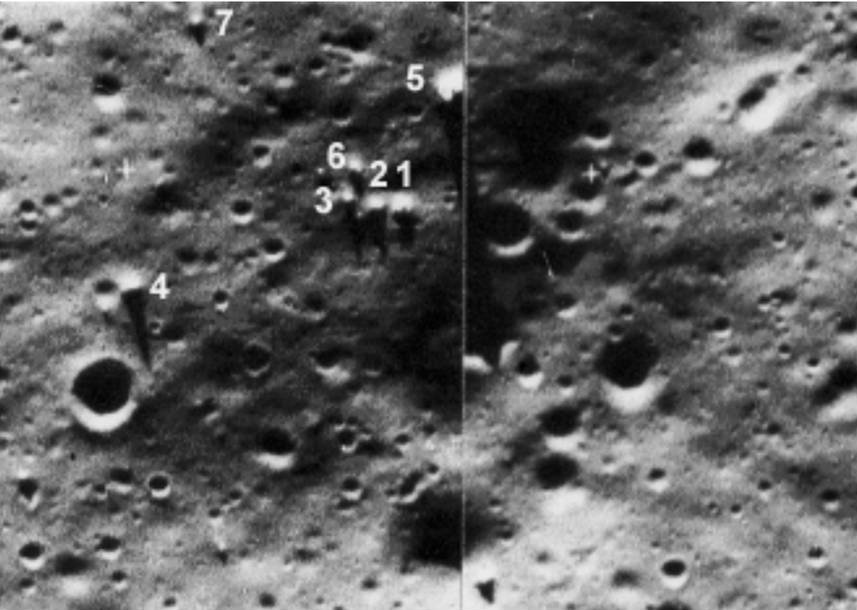
Em meados da década de 1960, em preparação para as missões Apollo, uma série de sondas espaciais Lunar Orbiter foram enviadas para a Lua para procurar locais de pouso adequados. Em 22 de novembro de 1966, a Lunar Orbiter 2 fotografou vários objetos na superfície que projetavam sombras extremamente longas (Figura 1). Segundo a NASA, com base no comprimento de sua sombra, o maior objeto tinha cerca de 15 metros de largura em sua base e 25 a 40 metros de altura. Ao ver a foto, William Blair, um antropólogo da Boeing (a empresa que fabricou o Lunar Orbiter), lembrou-se dos padrões vistos em mapas de levantamentos aéreos de sítios arqueológicos pré-históricos. Intrigado com o comprimento das sombras, a disposição geométrica aparente e a proximidade de uma depressão retangular incomum, ele sugeriu que os objetos poderiam ter origem artificial. Blair encaixou uma série de triângulos isósceles e retos nos objetos (Figura 2). Ele argumentou que se os objetos fossem o resultado de algum processo natural na Lua, eles seriam distribuídos aleatoriamente, formando triângulos escalenos ou irregulares.
A hipótese de Blair foi descartada por membros da comunidade científica lunar. De acordo com Richard Shorthill, um geólogo da Boeing, “há muitas dessas rochas na superfície da Lua. Escolha algumas ao acaso e você eventualmente encontrará um grupo que parece estar de acordo com algum tipo de padrão”. Geólogos da NASA especularam que os objetos, aos quais eles se referem como “protuberâncias”, poderiam ser blocos de material expelidos de uma cratera por um impacto meteórico, material vulcânico ejetado por falhas na superfície lunar ou cones erodidos de antigos vulcões.
Em 1996, a fotografia original da Lunar Orbiter (LO2-61H3) foi localizada nos arquivos do National Space Science Data Center (NSSDC), digitalizada e analisada. Ao analisar a forma de suas sombras, Fleming demostrou os objetos serem em forma piramidal ou cônica. Ele também encontrou uma segunda imagem tirada de um ângulo ligeiramente diferente (LO2-62H3) que mostrava que um dos objetos (número 5 na Fig. 1) tinha uma base retilínea.
Uma porção da imagem Lunar Orbiter LO2-61H3 mostrando sete objetos verticais lançando longas sombras na superfície da Lua.
Região de Interesse
Devido à morfologia incomum desses objetos e sua proximidade a uma depressão retangular na superfície, uma análise 3-D da foto LO2-61H3 original foi realizada. Anteriormente, existia alguma confusão sobre a localização desses objetos na superfície lunar. A Seção 2 localiza-os corretamente a cerca de 1/3 de milha a norte-nordeste da cratera Ariadaeus B, a cerca de 5º Norte e 15º Leste. Na Seção 3, um modelo de elevação digital (DEM) sobre a área de interesse é calculado usando um algoritmo de SOM (Shape-from-Shading) de imagem única. Usando informações de inclinação do DEM para corrigir o aumento do comprimento da sombra, o objeto mais alto é encontrado com cerca de 50 pés de altura – consistente com a estimativa original da NASA, e as estimativas mais recentes de Fleming baseadas em sombreamento e análises de sombra. Na Seção 4, o DEM é usado para criar uma série de imagens estéreo sintéticas para visualizar as cúspides e o terreno circundante em 3-D. Mostramos que a depressão retangular parece fazer parte de uma rede maior de características colapsadas semelhantes às que foram estudadas por Arkhipov. A seção 5 discute nossas descobertas e sugere áreas para trabalhos futuros.
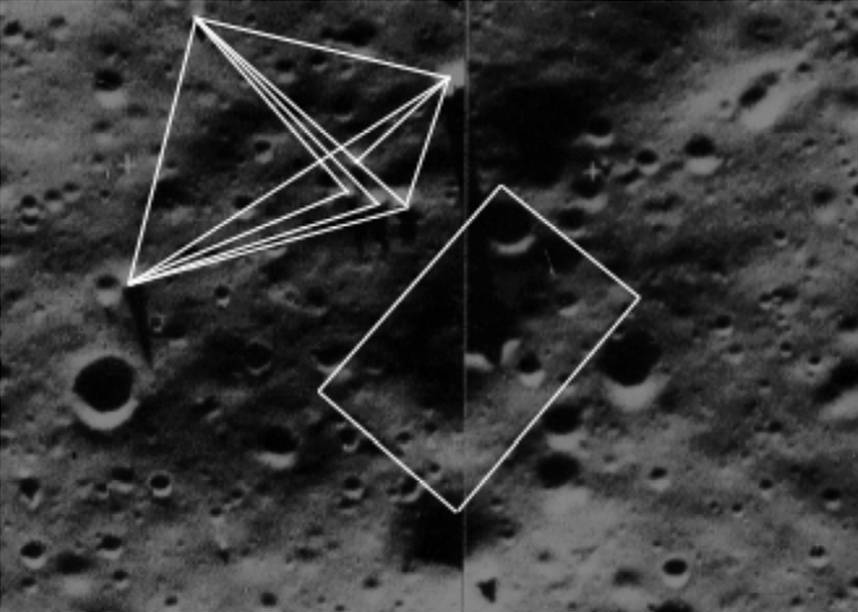
Os triângulos podem ser formados desenhando linhas entre objetos selecionados. O limite da depressão retangular também é indicado (os gráficos são reproduzidos a partir de uma fotografia de jornal).
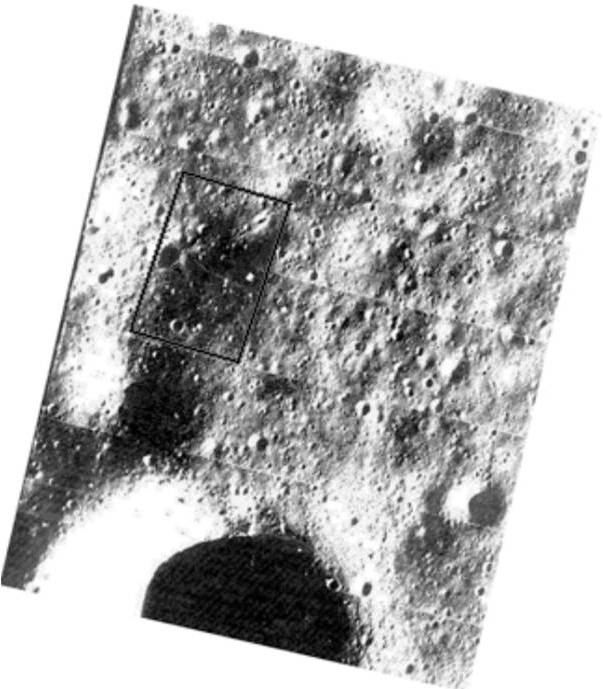
No comunicado de imprensa original da NASA, dizia-se que as cúspides estavam localizadas a 4,5º N e a 15.3º Leste, no quadro H61, emolduras 383 e 384. De um modo geral, esta região situa-se no limite ocidental do Mar da Tranquilidade, a cerca de 300 km a noroeste do local de pouso da Apollo 11. Mais precisamente, as coordenadas da NASA colocariam os objetos a cerca de 15-20 km a sudeste de Ariadaeus B, que está fora da pegada de imagem LO-2 para aquele quadro. Usando imagens do Lunar Orbiter e Clementine (Figuras 3-5), pode-se mostrar que os framelets de alta resolução estão na verdade localizados perto de 5ºN por 15º Leste, que está dentro da área de pegada. Esta localização revisada fica ao norte da cratera Ariadaeus B e ao sul de Rima Ariadaeus.
Reconstrução do Terreno
A Figura 8 é a foto digitalizada fornecida por Fleming, depois de ter sido suavizada e subamostrada por um fator duplo. Ela é rotacionada para que o Sol, que estava a 11º acima do horizonte leste, esteja voltado para a direita. A linha no meio da foto é uma emenda entre tiras de filme (quadros). Cruzes brancas são marcas de calibração na câmera espaçadas a cerca de 750 pés de distância (portanto, a resolução efetiva da imagem é de 4,2 pés / pixel).
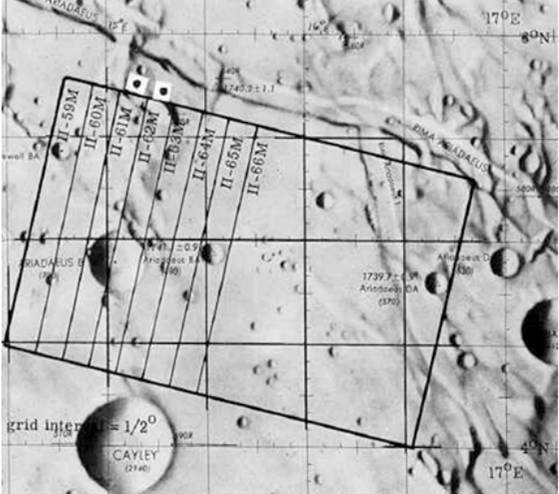
Representação cartografica do local sob investigação
Um algoritmo de forma-de-sombreamento foi usado para calcular um modelo de elevação digital (DEM) sobre a área. Forma-de-sombreamento integra informações de brilho da imagem ao longo das linhas na direção do Sol para obter estimativas de altura. A Figura 9 mostra o DEM resultante renderizado como uma imagem de cor falsa. A Figura 10 sobrepõe linhas de contorno de elevação igualmente espaçadas sobre a imagem original para mostrar a correspondência entre a imagem e sua topografia subjacente.
Para verificar a precisão do DEM, uma representação sombreada do DEM foi gerada usando o azimute do Sol e ângulos de elevação. A imagem prevista (Figura 11) está de acordo com a imagem original (Figura 8) e confirma a precisão relativa do DEM.
Mosaico de baixa resolução de imagens de Clementine (de bi03n015.img) sobre a área correspondente à Figura 3.
Para avaliar a precisão métrica do DEM, nós a usamos para estimar a altura do objeto 5 a partir de sua sombra. Para determinar a altura de um objeto a partir de sua sombra, é preciso conhecer o ângulo do Sol e a inclinação local. A Figura 12 é um corte transversal da superfície de elevação, começando de um ponto ao lado do objeto 5. Segue o terreno ao longo da linha paralela à sombra projetada na direção oposta ao sol. Movendo-se da esquerda para a direita ao longo do perfil de elevação, o terreno desce para baixo do objeto. A inclinação média é de aproximadamnete 5,7º. Assim, o ângulo de elevação efetivo do Sol é o ângulo do Sol acima do horizonte menos a inclinação local, 11-5,7 = 5,3º. Usando um comprimento de sombra medido de 513 pés, a altura do objeto é de 513 x tan (5,3 graus) = 47,6 pés. A estimativa de Fleming da inclinação local, 6,9º, leva a uma estimativa de altura de cerca de 61,6 pés.
Visualização do Terreno
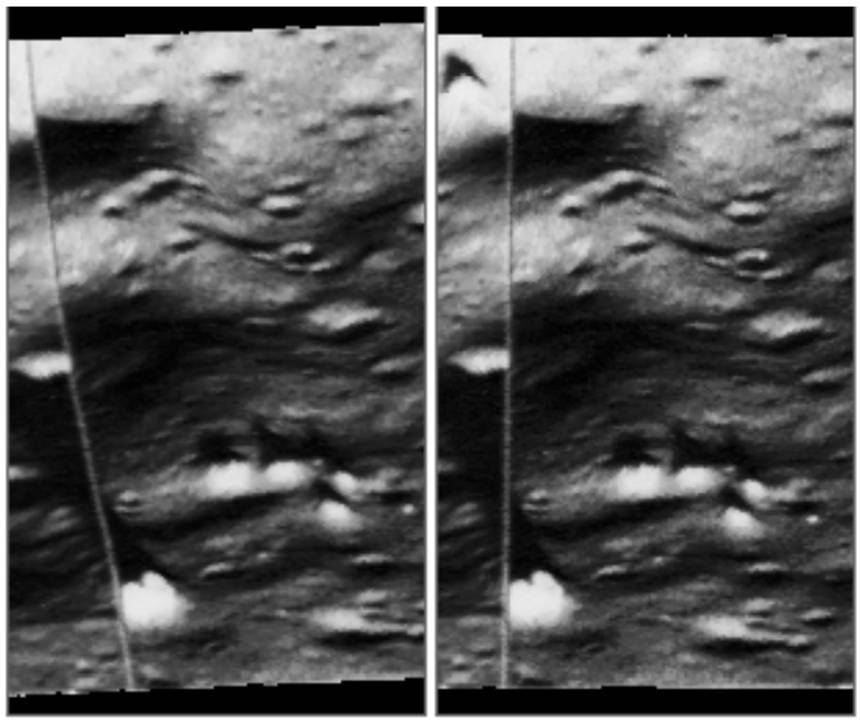
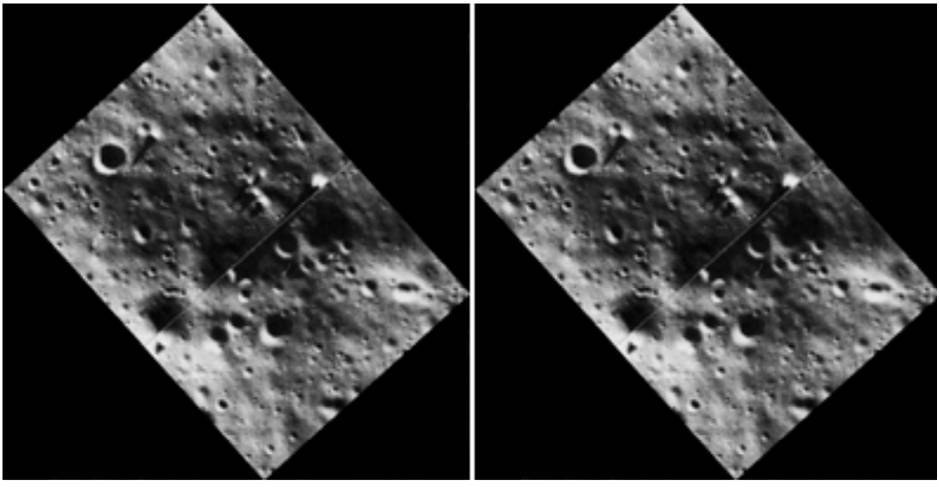
Dada uma imagem e seu mapa de altura, as visualizações de outras perspectivas podem ser produzidas usando técnicas de renderização de computação gráfica. Ao gerar duas visualizações a partir de posições ligeiramente diferentes e apresentá-las separadamente para os olhos esquerdo e direito, um efeito estereoscópico 3D é produzido. Uma variedade de vistas estereoscópicas simuladas são apresentadas nas Figuras 13-21.
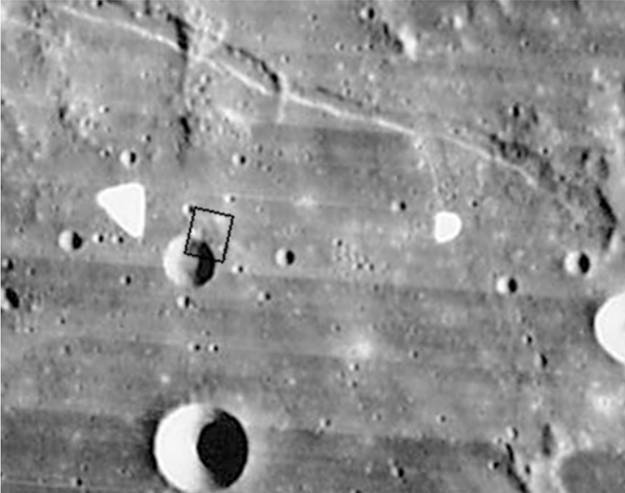
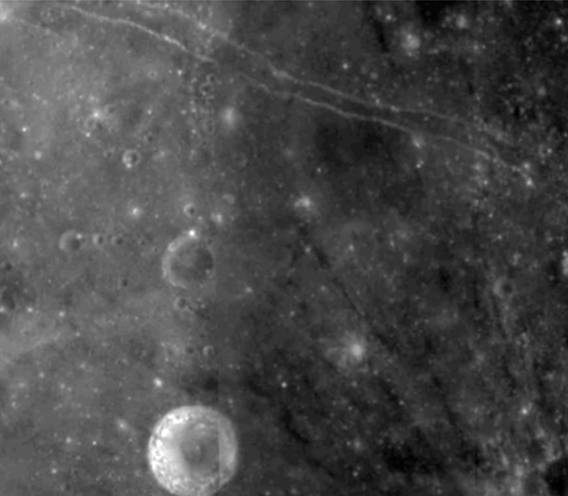
Imagem da Orbiter lunar 4 mostrando registrando a área em alta resolução de LO-2 (veja a Figura 6)
A Figura 13 apresenta vistas em 3-D da imagem na Figura 8 mapeadas em sua superfície de elevação (Figura 9). Como visto nessas versões, o terreno é mais alto na parte superior da imagem (Figura 8). De cima para baixo, inclina-se para baixo, com o ponto mais baixo aparecendo dentro da depressão retangular. Continuando para baixo, o terreno sobe novamente, mas a uma altura um pouco menor do que no topo. Uma tendência semelhante ocorre da direita para a esquerda.
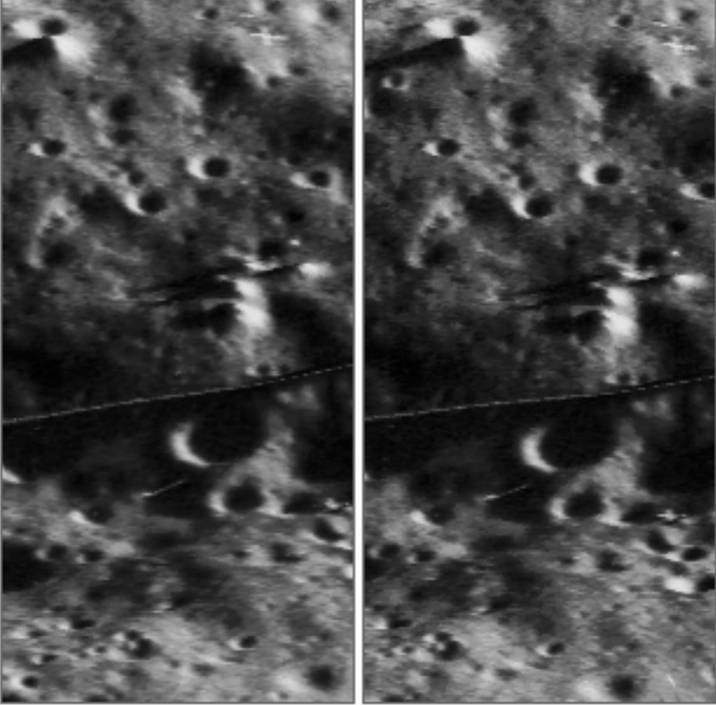
A Figura 15 renderiza todos os objetos no contexto do terreno circundante. Objeto 4 está perto do topo. Entre o objeto 4, e o grupo de objetos 1, 2, 3 e 6 está uma área ampla que é mais baixa que o terreno acima dela, mas maior que a depressão retangular abaixo. A depressão está em primeiro plano com a sombra do objeto 5 atravessando-a. Uma visão alternativa é apresentada na Figura 16.
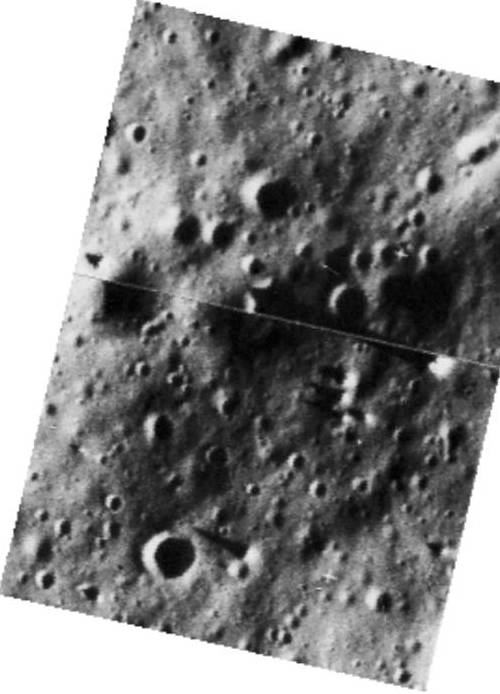
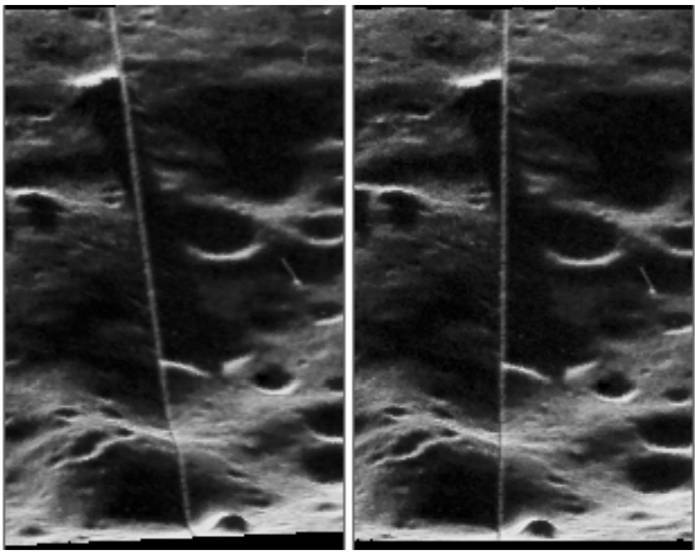
Uma parte da imagem LO2-62H3 coletada ao longo da trilha ao norte de Ariadaeus B14. Esta imagem envolve a região retangular identificada na Figura 5
Essas visões confirmam o fato de que são os objetos que projetam sombras no terreno que se opõem ao Sol, responsáveis pelo tamanho exagerado de suas sombras.
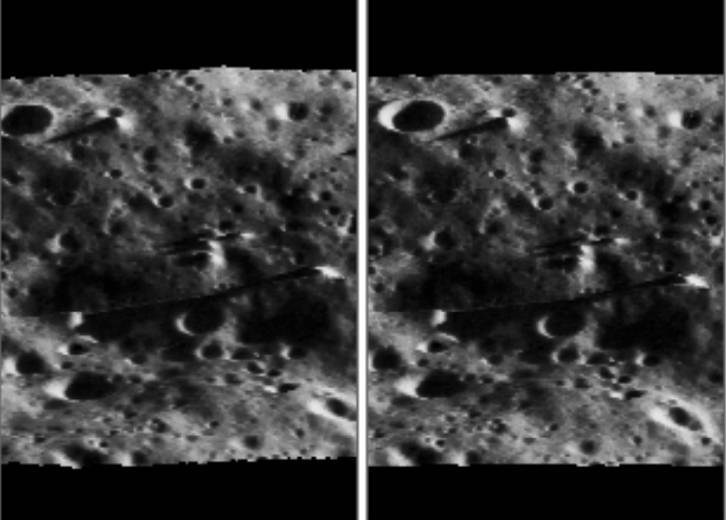
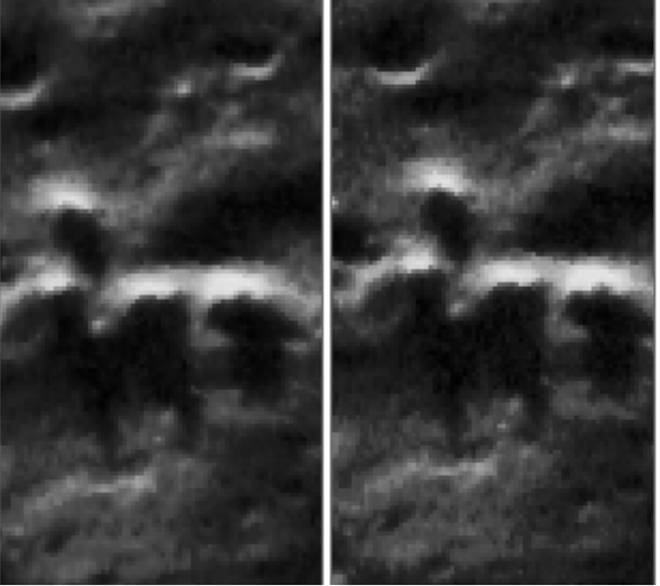
A vista, em perspectiva na Figura 17, confirma que os objetos têm um tipo cúspide ou, no caso do objeto 5, uma forma semelhante a um bicúspide. A vista para baixo na Figura 18 sugere que os objetos 1 e 2 estão colocados em um pedestal ou base de algum tipo.
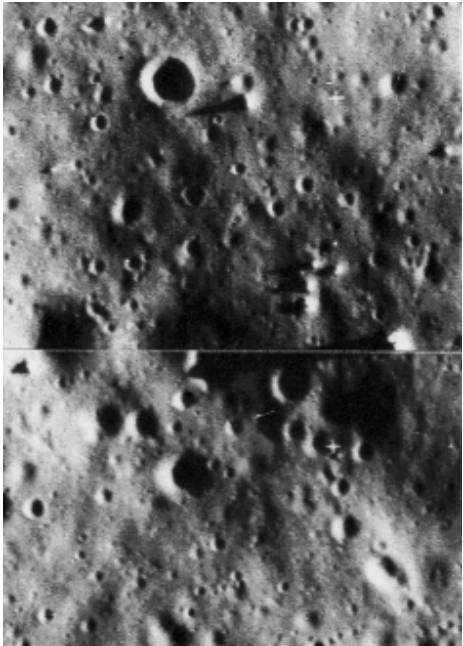
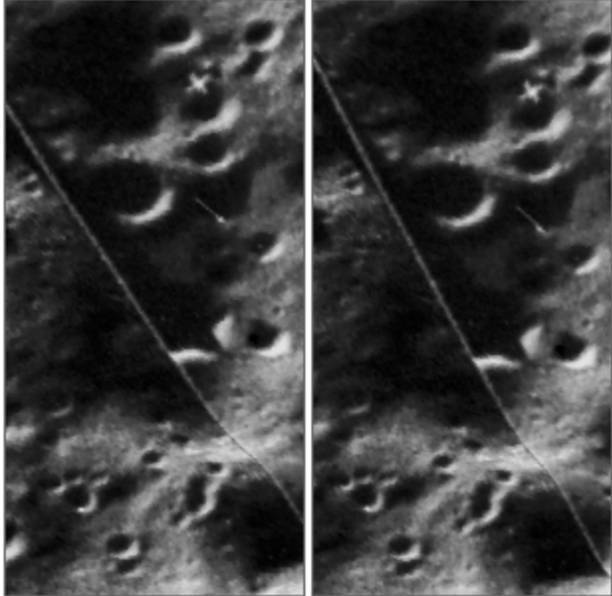
LO2-61H3 da Figura 1 após ser rotacionado. Esta imagem corresponde aproximadamente à região retangular identificada na Figura 6.
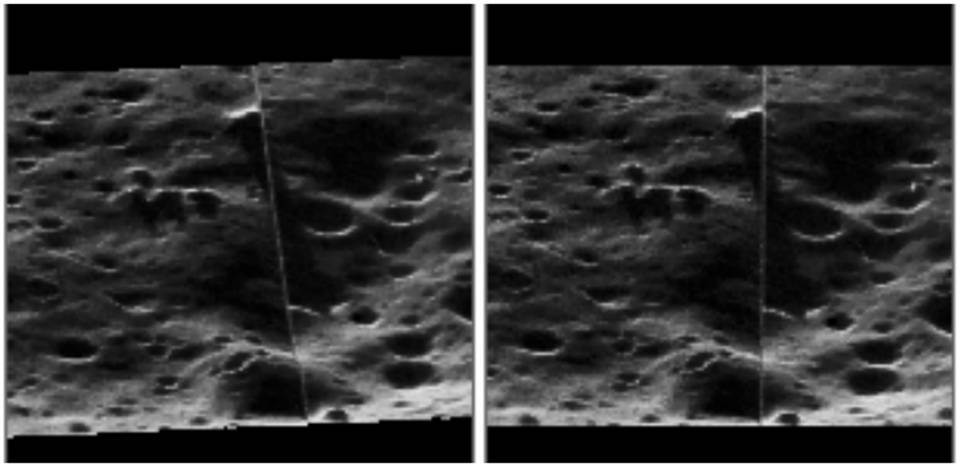
A figura 19 mostra a sombra do objeto 5 caindo sobre a depressão retangular. A depressão é particularmente intrigante. A Figura 20 é uma visão estéreo de um ângulo de visão mais alto. Seus lados parecem ser muito retos e contêm características lineares sutis (lineamentos) que aparecem como uma série de pequenas crateras ou poços distribuídos em uma linha.
Uma imagem estéreo sintética de LO2-61H3 (Figura 21) revela que a depressão retangular é a parte mais profunda de uma rede maior de colapsos retilíneos da superfície. Uma possibilidade é que esta rede seja de origem geológica, talvez conectada com Rima Ariadaeus ao norte. Por outro lado, sua semelhança com os padrões quase quasi-retangulares de depressões e lineamentos de Arkhipov sugere a possibilidade de que possa ser uma estrutura artificial.
Versão reduzida da parte da imagem LO2-61H3 rotacionada para que o norte esteja para cima.
Discussão
O tamanho da depressão retangular é de cerca de 100 por 150 metros. Trata-se do tamanho de características semelhantes encontradas nas estruturas wafer e reticulares de Arkhipov. É possível que essa rede de colapsos faça parte de uma estrutura maior. As Figuras 21 e 22 foram giradas para melhor mostrar a forma retilínea da depressão principal e dos colapsos circundantes (limites representados por linhas verdes na Figura 22). Lineamentos sutis alinhados nas direções horizontal e vertical (mostrados em azul na Figura 22) também são evidentes. Nesse quadro de referência rotacionados, linhas horizontais e verticais (vermelho) podem ser desenhadas conectando os centros aproximados dos objetos 3 e 5 e os objetos 1, 6 e 7, respectivamente. Curiosamente, os lados da depressão e colapsos, os lineamentos e essas linhas entre as cúspides estão todos nas mesmas direções.
Em baixos ângulos de iluminação, as sombras podem criar a ilusão de estruturas orientadas. Os sensores de varredura de linha e os scanners de fotos também podem introduzir artefatos que dão a impressão de uma estrutura linear. Nas Figuras 21 e 22, estas direcções situam-se a cerca de 45 graus dos eixos vertical e horizontal. Assim, as estruturas / alinhamentos retilíneos não podem ser causados por efeitos de iluminação ou artefatos de varredura.
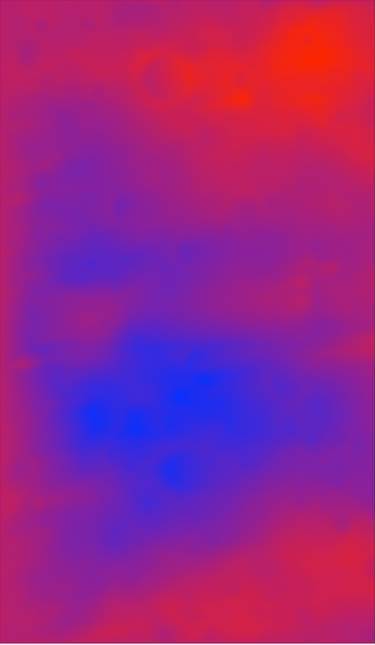
Representação de cores falsas do DEM mostrando áreas inferiores em azul e áreas superiores em vermelho.
Em resumo, as principais características que sugerem que esses objetos e seus terrenos envolventes podem ser de origem artificial são:
• a presença de múltiplos objetos, de forma cônica ou piramidal, que não parecem ser rochas ou afloramentos típicos.
• alinhamentos perpendiculares entre cinco dos sete objetos
• uma rede de colapsos retangulares da superfície
• lineamentos horizontais e verticais
• correlações nos alinhamentos entre esses objetos, a orientação da depressão retangular e a direção dos lineamentos
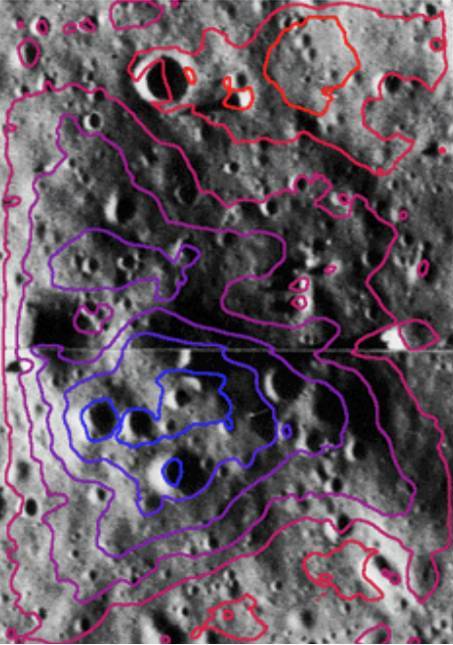
Linhas de contorno do DEM sobrepostas na imagem do Lunar Orbiter.
Tendo identificado precisamente a localização das cúspides, agora é possível determinar se alguma imagem da Clementine está disponível na área. Em caso afirmativo, uma análise mais detalhada da morfologia das cúspides, bem como a da rede circundante de terreno em colapso, pode fornecer informações adicionais sobre as origens dessas características de superfície.
Mark J. Carlotto recebeu os diplomas B.S., M.S. e Ph. D. em Engenharia Elétrica pela Carnegie-Mellon University em 1977, 1979 e 1981. Possui mais de 20 anos de experiência em sensoriamento remoto por satélite e processamento digital de imagens. Dr. Carlotto estudou fenômenos anômalos, incluindo características incomuns na Lua, em Marte e no espaço. Seu livro, The Martian Enigmas, descreve em detalhes sua análise das imagens da Face e de outros objetos possivelmente artificiais em Marte, fotografados por uma nave espacial Viking, em 1976. O Dr. Carlotto publicou mais de setenta artigos em revistas e congressos técnicos e científicos. Seu trabalho foi relatado em New Scientist, Omni e Newsweek, e apareceu em inúmeros programas de televisão, incluindo a série Cosmos, de Carl Sagan, e Sightings.

Imagem sombreada calculada a partir de DEM com base em uma função de refletância de superfície de Lambert. A semelhança com a imagem na Figura 8 valida a precisão do DEM.
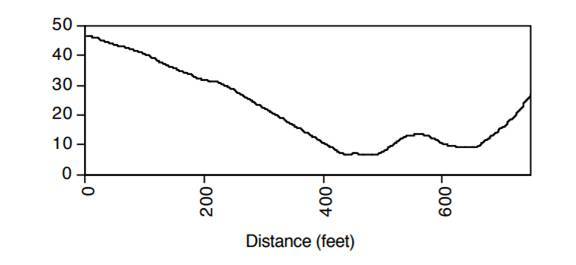
Perfil de elevação ao longo da sombra do objeto 5.
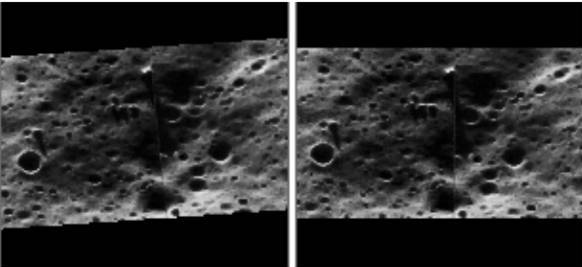
Uma visão geral da região de interesse olhando da esquerda, superior, direita e inferior, 50 graus acima do horizonte, com ampliação de 0,2x.
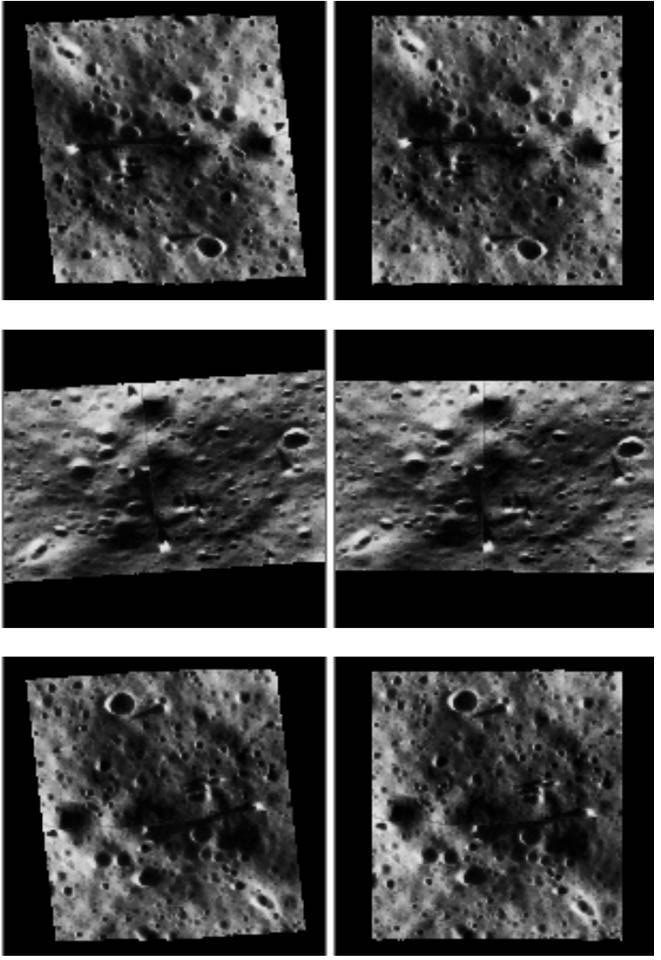
Uma visão geral da região de interesse olhando da esquerda, superior, direita e inferior, 50 graus acima do horizonte, com ampliação de 0,2x.
Objetos 1-3 em primeiro plano olhando de baixo, 30 graus acima do horizonte com ampliação de 1x.
Olhando para baixo a partir de 30 graus acima do horizonte em uma ampliação de 0,5x nos objetos 1-6 com a depressão retangular em primeiro plano.
Olhando à direita a partir de 30 graus acima do horizonte a uma ampliação de 0,5x nos objetos 1,2,3,5 e 6 com a depressão retangular em primeiro plano.
Vista da esquerda dos Objetos 1, 2, 3, 5 e 6, 30 graus acima do horizonte com ampliação de 1x.
Visão de perto olhando para a direita nos Objetos 1, 2, 3 e 6 de 50 graus acima do horizonte com ampliação de 2x./div>
Objeto 1 e sombra caindo através de trincheira retangular olhando para a direita a partir de 30 graus acima do horizonte em 1x de ampliação.
Vista da depressão retangular de 50 graus acima do horizonte em 1x ampliação.
LO2-61H3 rotacionado em 40 graus para enfatizar a estrutura horizontal e vertical sutil no fundo.
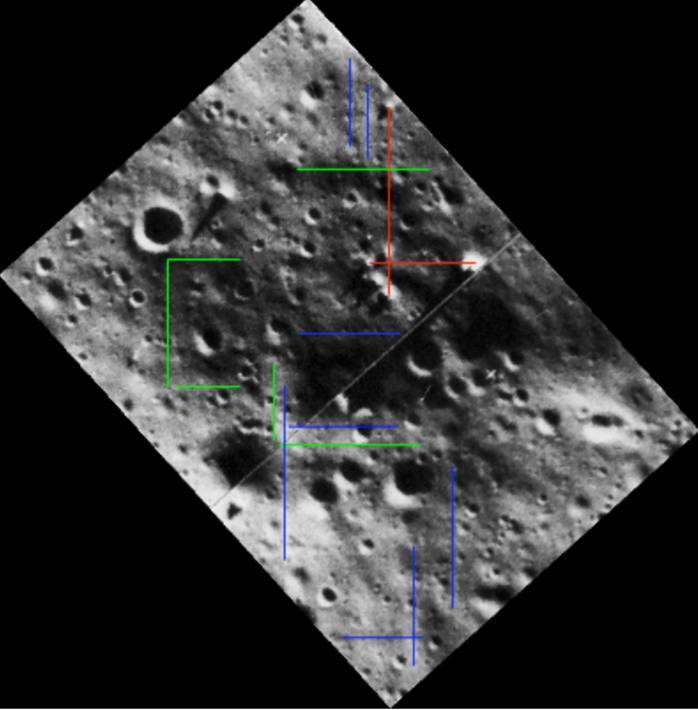
Correlações nos alinhamentos horizontal e vertical e estrutura entre objetos 1,3,5,6 e 7 (vermelho), bordas de depressões retangulares (verde) e lineamentos (azul).
Com informações de:
